連載
第7回 ITRFと衛星測地に使われる主な地球基準座標系
2018年01月16日
7.主な地球基準座標系
地球基準座標系は、宇宙時代とともに発展してきました。人工衛星を打ち上げ管制するには準拠する基準座標系を定義し、衛星軌道を計算し衛星の追跡を行う必要があります。従って、測位衛星システムを立ち上げる時にそのための準拠座標系が準備されることになります。世界標準であるITRS/ITRFの成り立ちについてはすでにお話ししましたが、その他に衛星測位のための地球基準座標系が存在しています。今回は今世紀に入ってからのITRFのいくつかのバージョン、GPSの準拠座標系であるWGS 84、その他のGNSSが準拠する座標系、そして我が国の準天頂衛星が準拠する座標系などについて紹介します。
7.1 ITRS/ITRF
IERSが構築するITRS/ITRFは、すでに紹介のとおり現在の地球基準座標系の世界標準になっています。複数の宇宙測地技術を組み合わせ、正確で信頼度の高いシステムとなっているからです。
21世紀に入ってからは以下のように4回の改訂があり、現在ITRF2014が最新です。
ITRF2000:観測局数は約800局。地域的なGPS観測網を取り入れて稠密化を図ったため観測局数が増えました。
ITRF2005:608局。各宇宙測地技術の時系列データ(主に1週間ごと)と1日ごとの地球回転パラメータを入力として結合するという方法を採用しました。以前は観測全期間で解いた各技術の解を結合していました。新しい方法では、観測局座標の非線形な動きや飛び、地球重心・スケールなどの時間変化をとらえることができます。
ITRF2008:934局。ITRF2005を改良・高精度化したものです。この座標系は、2011年東北地方太平洋沖地震後の日本測地系2011(JGD2011、元期2011.4)のフレームとして使われています。ちなみに、日本測地系2000(JGD2000、元期1997.0)に使われたITRF94の観測局数は約240です。
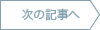
ITRF2014:1499局(図1)。局位置の変化に初めて非線形のモデルを取り入れました。季節変化及び地震後の余効変動がある124局の速度が新しいモデルで計算されています(連載第6回参照)。
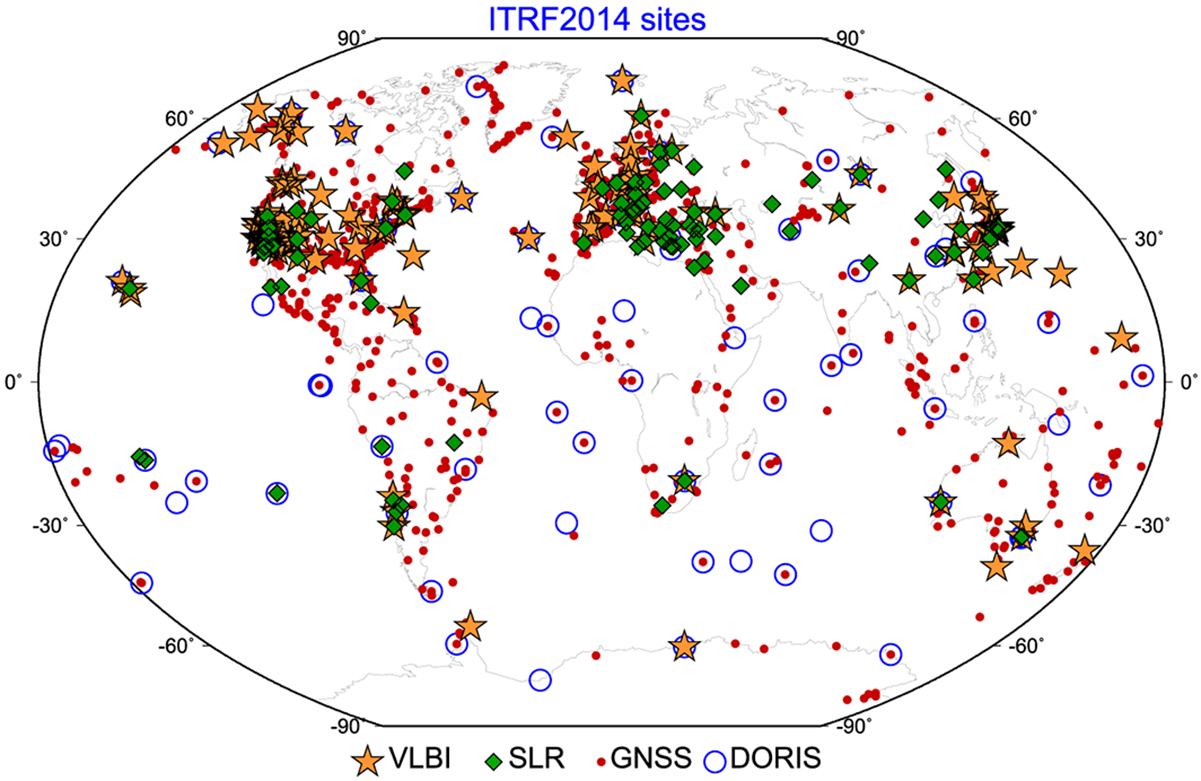
図1.ITRF2014の観測局(参考文献1より)
現在、新しいフレームは元期において座標軸の向きは以前のフレームと連続に、原点はSLRの結果と、スケールはVLBIとSLRの平均に一致するようにして計算されます。また、各フレーム間の変換パラメータ(とその速度)も提供されています(参考文献7)。例えば、ITRF2008と2005及び2000との変換は表1のとおりです。
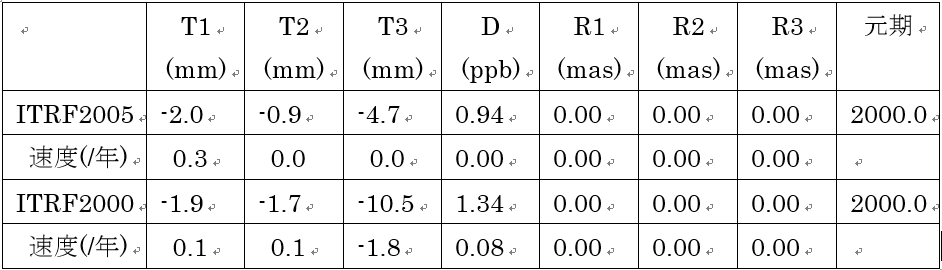
表1. ITRF2008との変換パラメータ
ここで、T1、T2、T3は各座標のオフセット、Dはスケール差、R1、R2、R3は各軸の回りの回転角、ppbは1/109、masは1/1000秒角です。1ppbは地球半径で約6mm、1masは地球表面で約3cmのずれにあたります。図2に原点オフセットと回転がR1だけの場合の変換パラメータを示しました。
図2. 座標系の変換パラメータ(ITRF2008からITRF××へ)
7.2 WGS 84
WGS 84は座標系の名前でもありますが、アメリカ合衆国国防総省の国家地球空間情報局(NGA)が管理しており、座標系の定義と実現、楕円体、重力モデル、ジオイド、地磁気モデルなどを含んだ総合的なシステムになっています。ここでは、基準座標系としての定義とその実現されたフレームについて述べます。
・座標系の定義
ITRSに従っています。
- 原点は大気・海洋も含んだ地球の重心。
- 長さのスケールは相対論から導かれる地心座標系のもの。
- 座標軸の向きは、1984.0のBIH基準系のものを初期値とする。
- 座標軸の向きの時間変化はプレート運動のNNR(no-net-rotation)の条件に従う。
・WGS 84の実現
WGS 84の基準局は、アメリカ空軍とNGAのGPS追跡局を結合したものです(図3)。図からわかるように日本には基準局がなく、最も近い点はソウルです。周知のようにWGS 84はGPS運用のための基準座標系ですから、GPSを受信すればWGS 84における座標値を得ることになります。
最初の実現は1987年で、ITRFの前身であるBIH座標系(1984.0)(連載第3回参照)を基準として採用したものです。その後5度のアップデートを経て現在はWGS 84(G1762)となっています。GはGPS観測のG、1762はGPS週番号を示しており、座標値が承認された日時を示すものです。WGS 84(G1762)はITRF2008に整合しています。具体的には、ITRF2008のGNSS版の実現であるIGb08〈次項参照〉の座標を固定してWGS 84の基準局の位置を出しています。速度は、NGAの局はIGb08での値を、空軍の局は近傍のIGS点の速度を採用しています。
WGS 84のアップデートでは常に最新のITRFと整合をとるように努力がはらわれてきました。国際的な標準に従うことで正確な座標系の実現が可能となり、また他のGNSSとの相互運用性を確保するためです。WGS 84(G1762)とITRF2008との変換パラメータの値は、スケール差(約-3ppb)を除くと1cm以下となっており、実用上同じと考えて差し支えありません(参考文献4)。ただし、WGS 84とITRFの公式な変換パラメータは存在しないので、日本国内においてWGS 84座標から測量法に関連付けられた座標を正確に得ることはできません。
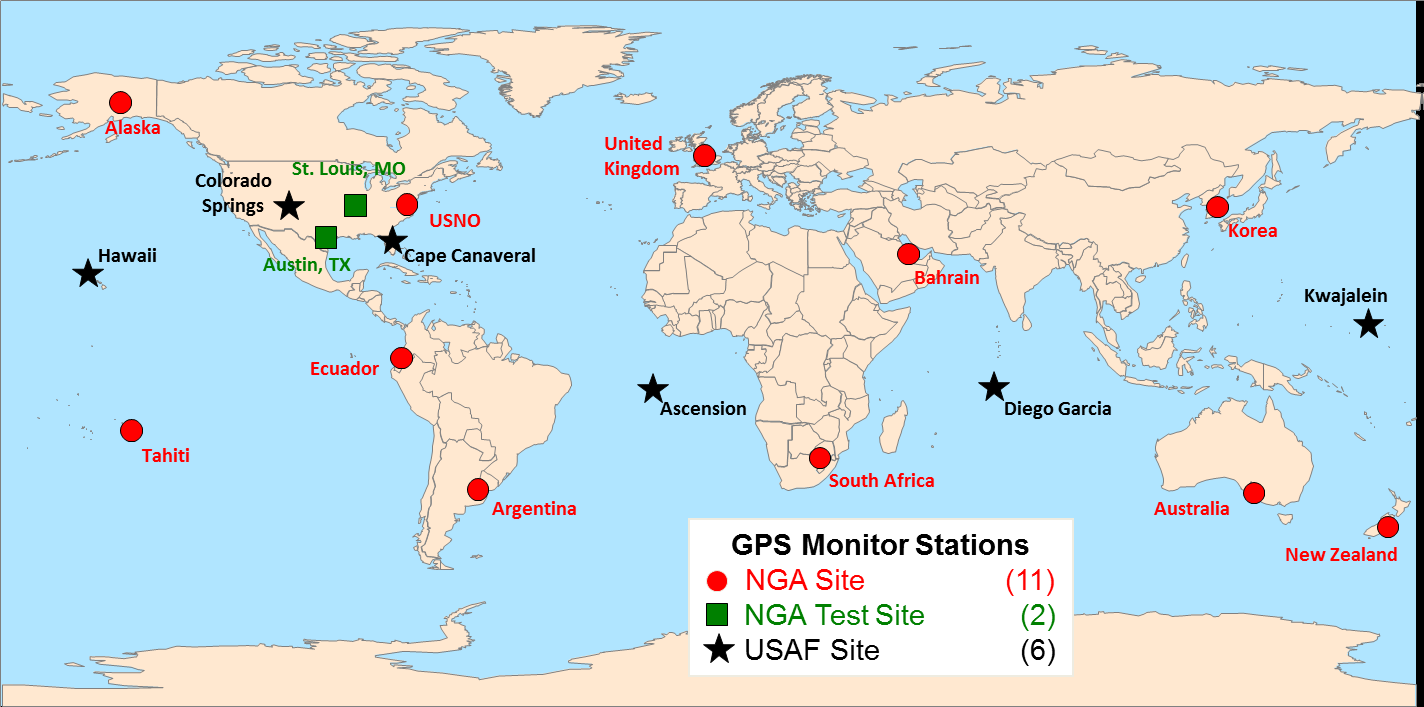
図3.WGS 84の追跡局(参考文献10より)
・現在位置の計算
放送暦の計算のため局の速度を用いて毎年座標位置がアップデートされています。その年の中間点での位置が暦の計算に用いられています。
7.3 IGSによる基準系
IGSはGNSSユーザのために様々なプロジェクトを行って衛星軌道・時計など衛星測位ユーザのために重要なプロダクトを提供しています。IGSのプロダクトは2000年以降、基準系のための観測局(RS)の座標・速度を用いて計算しています。ITRFに準拠していますが、内部の整合性はGNSSのみを使ったほうが高いのでRSの位置・速度を再計算してIGS基準系を実現しています。IGS基準系は2001年からIGS00、2004年からIGb00、その後IGS05/IGb05(2006~2011)、IGS08/IGb08(2011-2017)、IGS14(2017~)に至っています。IGbとなっているのは改良版です。IGS14の基準局は、ITRF2014のIGS局から安定性や地球上での分布を考えて250局以上が選ばれています(図4)。
日本の電子基準点網はIGS05に結合され、日々の座標であるF3解を得ています。F3解で得られた座標は、セミ・ダイナミック補正の地殻変動パラメータとして使われています。
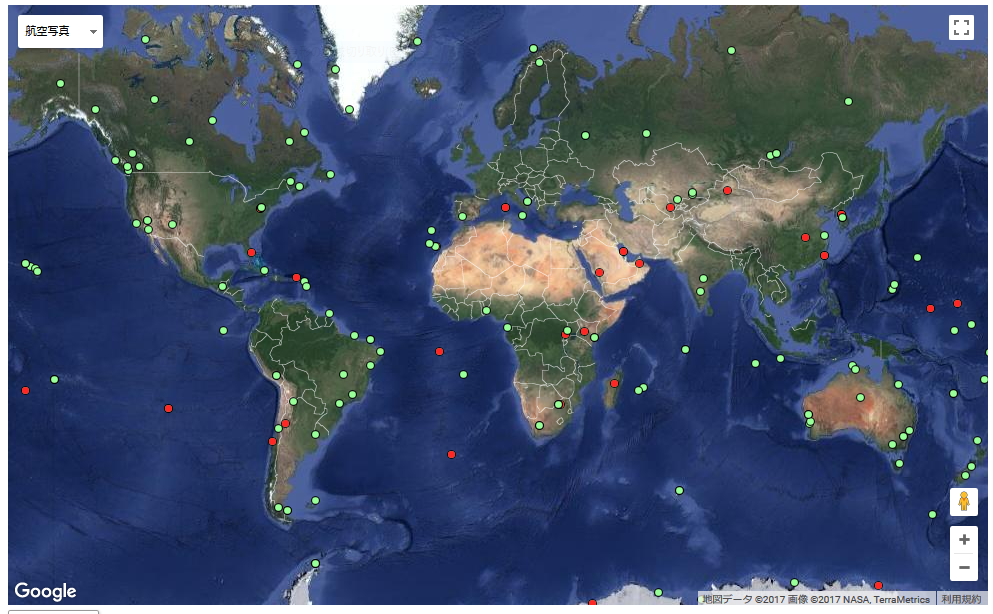
図4.IGS14の基準局(http://www.igs.org/networkより)
7.4 GLONASS
GPSに次ぐ歴史を持つGNSSがロシアのGLONASSです。準拠する座標系はPZ-90という名前ですが、PZ-90は米国のWGS 84と同様に総合的なシステム名でもあります。アメリカと同様、ロシア国防省が統括しています。
地球基準系の定義はITRSに従っておりWGS 84と同じです。2000年の構築以来、数回改訂され、最新のバージョンのPZ-90.11(2014年1月)となっています(図5)。PZ-90.11はITRF2008に整合しており、ITRF2008との変換パラメータはmmあるいはそれ以下であると報告されています(参考文献5)。
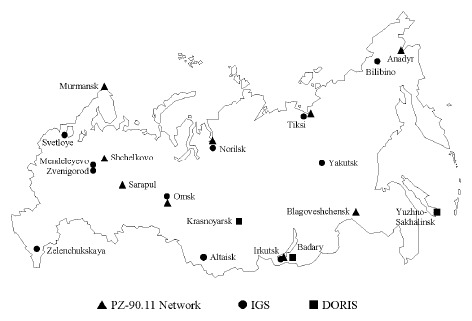
図5.ロシアにおける基準局(参考文献11より)
7.5 Galileo
ヨーロッパ連合のGNSSであるGalileoが準拠する座標系は、GTRFと呼ばれるものです。2016年時点での最新の実現は、GTRF17v02(March, 2017~)です。GTRF17v02はIGS14(ITRF2014)に厳密に整合しており、80以上の基準局から構築されています(図6)。GTRFは、GGSPとよばれる欧州各国の測地機関(ドイツ連邦地図・測地庁、フランス国土地理院、ポツダム地球科学研究所等)の協力で運営している組織により構築・維持されています。GTRFとIGS座標系との変換パラメータは、すべてmm以下となっています(参考文献2)。

図6.GTRF17v2の追跡局。赤はIGS局、青/緑はGalileo局(参考文献3より)
7.6 QZSS
我が国のQZSSの衛星システムとしての基準系はIGb08です。つまり測位衛星としてのPNT(測位・航法・時刻同期)サービスはIGSの実現する座標系と同じです(参考文献12)。
ただし、QZSSは高精度測位(cm級)のために一般の測位信号とは別に補強信号を出しており、そのデータが準拠する座標系はIGS05となっています。PNTサービスと座標系が違う理由は、補強信号は国土地理院の電子基準点データを基に生成されており、現在の電子基準点位置はIGS05に準拠して計算されているからです(参考文献6, 13)。
7.7 BeiDou
中国国家航天局が開発している測位衛星システムです。準拠する基準系は、中国の測地基準系であるCGCS 2000(中国測地基準系2000)がBeiDouの公式の座標系です(参考文献9)。ただし、CGCS 2000準拠からGPS観測によるCGS(Compass測地座標系)に代わるようです。CGCS2000は、膨大な点を含む国家基準点網であるため衛星測地の座標系としては実用的ではなく少ない追跡局で構成されるCGSが構築されました(図7)。CGSはITRF2008に整合しており、CGS(2012)の座標・速度の正確さは、それぞれ1cm、2mm/年と報告されています(参考文献8)。

図7.CGSの追跡局(参考文献8より)
以上、われわれが現在利用できる主なGNSSの基準座標系を見てきましたが、すべてが世界標準であるITRFと整合をとっていることがわかります。ITRFが更新されれば、それに応じて各基準系も更新されると思われます。マルチGNSS時代を迎えた現在こそ、相互の運用性が求められます。各GNSSがITRSを基に準拠する基準系を構築しているのは当然であるといえましょう。ただし、細かな相違点はありますので、精度や目的によって準拠する座標系を意識しなければならないケースもありますので注意は必要です。
略語集
BIH Bureau International de l’Heure 国際報時局
CGCS2000 China Geodetic Coordinate System 2000 中国測地基準系2000
CGS Compass Geodetic System Compass測地基準系(中国)
GGSP Galileo Geodetic Service Provider Galileo測地サービスプロバイダー
GTRF Galileo Terrestrial Reference Frame Galileo地球基準座標系
IERS International Earth Rotation and Reference Systems Service 国際地球回転・基準系事業
IGS International GNSS Service 国際GNSS事業
NGA National Geospatial-Intelligence Agency 国家地球空間情報局(アメリカ合衆国)
PNT Positioning, Navigation and Timing 測位・航法・時刻同期(測位衛星による基本サービス)
PZ-90 Parametry Zemli 1990 (Earth Parameters 1990) ロシアの世界測地システム
QZSS Quasi-Zenith Satellite System 準天頂衛星システム(日本)
RS Reference Frame Station 基準系構築のための観測局(IGS)
WGS 84 World Geodetic System 1984 アメリカ国防省による世界測地システム
参考文献
- Altamimi, Z., P. Rebischung, L. Metivier, and C. Xavier (2016), ITRF2014: A new release of the International Terrestrial Reference Frame modeling nonlinear station motions, J. Geophys. Res. Solid Earth, 121, 6109–6131, doi:10.1002/2016JB013098.
- Werner ENDERLE, Galileo Terrestrial Reference Frame (GTRF), European Space Agency, 8th Meeting of ICG, 2013,
http://www.unoosa.org/oosa/en/ourwork/icg/meetings/icg-08/d.html - Werner ENDERLE (on behalf of the GGSP Consortium), Galileo Terrestrial Reference Frame (GTRF): Status, 12th Meeting of ICG, 2017,
http://www.unoosa.org/oosa/en/ourwork/icg/meetings/icg-12/d.html. - Stephen Malys, Robert Wong, Scott A. True, The WGS84 Terrestrial Reference System in 2016, 11th Meeting of ICG, 2016,
http://www.unoosa.org/oosa/en/ourwork/icg/meetings/icg-11/d.html. - V. V. Mitrikas, S.N.Karutin, I.V.Gusev, Accuracy Assessment of PZ-90.11 Reference Frame Based on Orbital Data Processing of GLONASS Ephemeris, 11th Meeting of ICG, 2016,
http://www.unoosa.org/oosa/en/ourwork/icg/meetings/icg-11/d.html. - 中川他、GPS連続観測システム(GEONET)の新しい解析戦略(第4版)によるルーチン解析システムの構築について,国土地理院時報(2009,118集)
- Petit, G. and Luzum, B.(eds.), IERS Conventions (2010), IERS Technical Note; No. 36, 2010.
- Ziqing Wei, China, Compass Geodetic System, 7th Meeting of ICG, 2012,
http://www.unoosa/oosa/en/ourwork/icg/meeting/icg-07/d.html. - BeiDou Navigation Satellite System Open Service Performance Standard (Version 1.0), China Satellite Navigation Office, December 2013
- Department of Defense World Geodetic System 1984 (WGS 84), NGA Standard, NGA.STND.0036_1.0.0_WGS84, 2014-07-08.
- PARAMETRY ZEMLI 1990, Reference Document, MILITARY TOPOGRAPHIC DEPARTMENT OF THE GENERAL STAFF OF ARMED FORCES OF THE RUSSIAN FEDERATION, Moscow 2014.
- Quasi-Zenith Satellite System Interface Specification, Satellite Positioning, Navigation and Timing Service (IS-QZSS-PNT-001), Cabinet Office, March 28, 2017.
- Quasi-Zenith Satellite System Interface Specification, Centimeter Level Augmentation Service (IS-QZSS-L6-001), Draft Edition, Cabinet Office, September 15, 2017.