




誤差論と最小二乗法
第8回付録 線形(線型)代数の基礎2
2020年03月18日
A2. 行列の演算
一次(線形)写像
![]() を
を![]() ベクトル、
ベクトル、![]() を
を![]() ベクトル、
ベクトル、![]() を
を![]() 行列としたとき
行列としたとき
![]()
は、![]() 次元ベクトル
次元ベクトル![]() を
を![]() 次元ベクトル
次元ベクトル![]() へ写すということを示しています。これを一次(線形)写像といいます。
へ写すということを示しています。これを一次(線形)写像といいます。![]() の時に一次変換という場合もあります。
の時に一次変換という場合もあります。
二次形式![]() を
を![]() 対称行列、
対称行列、![]() を
を![]() ベクトルとしたとき積
ベクトルとしたとき積
![]()
を二次形式といいます。値はスカラー(数)です。![]() が対称でない正方行列だとしても
が対称でない正方行列だとしても
![]()
ですから、
![]()
となり、二次形式は常に対称行列で書けることがわかります。
正定値行列
対称行列![]() がすべての
がすべての![]() に対して、
に対して、![]() となるとき、正定値といいます。また、
となるとき、正定値といいます。また、![]() となるとき半正定値といいます。
となるとき半正定値といいます。
対称行列![]() が正定値なら、正則行列
が正定値なら、正則行列![]() があって、
があって、
![]()
となります。従って、![]() も正則です。
も正則です。
以下の定理があります。![]() が正定値なら、その対角成分
が正定値なら、その対角成分![]()
![]() が半正定値なら、その対角成分
が半正定値なら、その対角成分 ![]()
また、
![]() を
を![]() 正定値行列、
正定値行列、![]() を
を![]() 行列としたとき、
行列としたとき、![]() ならば、
ならば、![]() は正定値 (5a)
は正定値 (5a)![]() または
または![]() ならば、
ならば、![]() は半正定値 (5b)
は半正定値 (5b)
です。
(参考) 共分散行列は正定値または半正定値ですが、半正定値となるのは変数間に線形関係があるときに限られます。
例. 二つの確率変数に常に![]() という関係があるとしましょう。
という関係があるとしましょう。![]() と書けるので、
と書けるので、![]() の共分散行列は
の共分散行列は![]() の分散
の分散![]() から誤差伝播により、
から誤差伝播により、
![]()
となります。この共分散行列は、二次形式を作ると
![]()
であり、![]() の時は0となるので半正定値です(上記(5b)の場合)。
の時は0となるので半正定値です(上記(5b)の場合)。
連立一次方程式
未知数![]() 個の
個の![]() 個の連立方程式
個の連立方程式
は行列の形に書けます。
![]()
![]() は
は![]() 行列、
行列、![]() は
は![]() 、
、![]() は
は![]() です。
です。 ![]() で
で![]() が正則ならば(6)の解がただ一つ、
が正則ならば(6)の解がただ一つ、
![]()
と求まります。
一般に、![]() なら方程式の数が未知数の数より多いので解は存在しません。
なら方程式の数が未知数の数より多いので解は存在しません。![]() なら解は無限に存在します。次の定理があります。
なら解は無限に存在します。次の定理があります。
![]() に解が存在する必要十分条件は、
に解が存在する必要十分条件は、![]() 。 (8)
。 (8)
ここで、![]() は、
は、![]() に列
に列![]() を付け加えた行列です。
を付け加えた行列です。
![]() と書くと
と書くと![]()
ですから、![]() となる
となる![]() がある
がある![]() (
(![]() の列空間)
の列空間)![]()
![]() 、となります。
、となります。
例1.
![]()
![]() のランクは、第1列と第2列を足すと第3列なので、
のランクは、第1列と第2列を足すと第3列なので、
![]() です。従って解をもちます。第3式×2+第2式=第1式×3ですから、実は1式は不要で解は一意に決まります(図1)。
です。従って解をもちます。第3式×2+第2式=第1式×3ですから、実は1式は不要で解は一意に決まります(図1)。
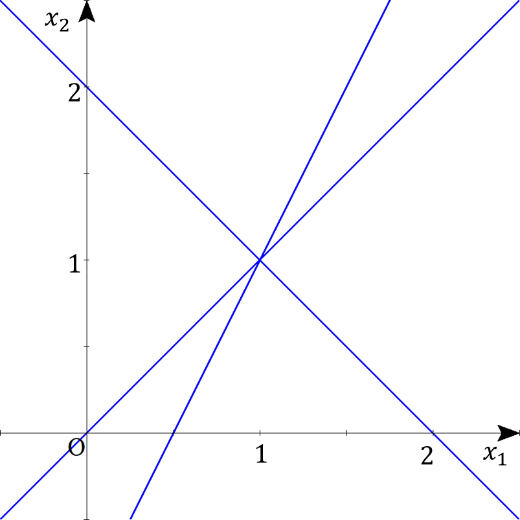 図1.一意の解
図1.一意の解
例2.
![]()
![]() の列は一次独立で、
の列は一次独立で、![]() となり、解を持ちません(図2)。このような場合、近似的に最適な解は、最小二乗法により
となり、解を持ちません(図2)。このような場合、近似的に最適な解は、最小二乗法により
![]()
を最小にすれば求めることができます。

図2.解なし
例3.
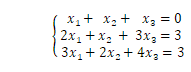
![]() で第1式と第2式を足すと第3式になるので、実質2式であり
で第1式と第2式を足すと第3式になるので、実質2式であり![]() となり解をもちます。第1,2式より
となり解をもちます。第1,2式より
![]()
と表せるので、解は、
![]()
となります。![]() は任意なので解は無限にあります。
は任意なので解は無限にあります。
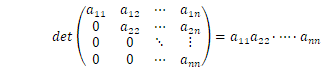
行列式
![]() 行列
行列![]() の行列式は、各行と列から1つずつ行列要素をとって掛け合わせ足した関数で次のように定義され、
の行列式は、各行と列から1つずつ行列要素をとって掛け合わせ足した関数で次のように定義され、![]() または
または![]() と書きます、
と書きます、
![]()
ここで![]() は
は![]() の並べ替え(置換)で、和はすべての置換について取り、符号は置換が偶なら正、奇なら負となります(置換はもとの
の並べ替え(置換)で、和はすべての置換について取り、符号は置換が偶なら正、奇なら負となります(置換はもとの![]() から2つずつ何回か入れ替えると得られますが、その回数が偶数なら偶置換、奇数なら奇置換といいます)。例えば、
から2つずつ何回か入れ替えると得られますが、その回数が偶数なら偶置換、奇数なら奇置換といいます)。例えば、
![]()
行列式には次のような性質があります。![]() が正則でない⇒
が正則でない⇒![]() 、
、![]() が正則⇒
が正則⇒![]()
![]()
![]()
![]() が正定値なら
が正定値なら![]()
![]() が正則なら
が正則なら![]()
また、正則な行列![]() の逆行列は行列式を使って次のように書けます。
の逆行列は行列式を使って次のように書けます。
![]()
ここで、 ![]()
例えば、(2 × 2) 行列なら
![]()
B. 多次元正規分布の確率密度関数
多次元の正規分布は以前にも紹介しましたが、ベクトルと行列で表示すると便利であるとともに変数の関係などが見えやすいのでここにまとめておきます。
標準化(平均=0、分散=1)された![]() 個の独立な正規分布確率変数
個の独立な正規分布確率変数![]() があるとします。その時の同時確率密度関数は、
があるとします。その時の同時確率密度関数は、![]() として、
として、
![]()
![]()
となります。![]() である一般の確率変数に戻すには
である一般の確率変数に戻すには
![]()
と変換すればよく、![]() の確率密度関数は、
の確率密度関数は、
![]()
となります。
C. テイラー展開
![]() (
(![]() )を滑らかな(何回でも微分可能な)実数値関数とし、
)を滑らかな(何回でも微分可能な)実数値関数とし、![]() を
を![]() の近傍の点とすると
の近傍の点とすると
![]()
と表されます。![]() は滑らかな関数です。第3項は
は滑らかな関数です。第3項は![]() の二次になっていますから、
の二次になっていますから、![]() が小さいとすると無視することができ
が小さいとすると無視することができ
![]()
![]()
となり![]() の線形式で書けることがわかります。測量では、未知数と観測量の関係が線形でないとき、テイラー展開を使って線形化するのが一般的です。
の線形式で書けることがわかります。測量では、未知数と観測量の関係が線形でないとき、テイラー展開を使って線形化するのが一般的です。






パラメータ情報
【地殻変動補正提供サービス】パラメータの生成と評価:2020年4月1日~4月30日
2020年03月31日
2020年4月1日から2020年4月30日を有効期間とする
地殻変動補正提供サービス パラメータを生成しましたので、お知らせいたします。
パラメータの精度評価結果は以下の通りです。
水平方向の推定誤差の平均値は、 0.010 mです。
水平方向の推定誤差の標準偏差は、0.006 mです。
水平方向の推定誤差が4cm以下の地域の割合は、99.44%です。
なお、今回生成したパラメータは、すべての電子基準点のデータを使用し、
パラメータの生成および精度評価を行っています。
今後、パラメータと評価指標の精度向上のため、
解析条件を変更する可能性がありますので、予めご了承ください。
座標系講座 生活編
第5回 まとめ
2020年03月16日
平成29年第3期地理空間情報活用推進基本計画によれば、平成30年度より我が国の準天頂衛星4機体制を確立し、衛星測位サービス、サブメータ級測位補強サービス等を開始します。更に、平成35年度を目途とする持続測位が可能な7機体制の構築に向けた取り組みが行われています。こうした衛星測位の高精度化及び高度化に伴って、国民は正確な位置情報を得ることができます。しかし、これらの正確な位置情報は、測量法上の位置ではなく、地上における国民生活上の位置情報としては、測量法及び測量作業規程の整備が要求されてきていることは、既に述べてきたところです。以下にそれらの整備に関する内容を列挙します。
1. フレームの統一
日本の測地座標系(フレーム)は、西日本及び北海道はITRF94(元期1997.0)及び2011年東北地方太平洋沖地震地域はITRF2008(元期2011.4)の2つによって構成されています(連載第1回 図16)。従いまして、これら二つの境界付近での処理が複雑になっています(連載第1回 8.フレーム境界における座標の不整合参照)。統一したフレームの構築は、衛星測位をより効果的なものにするためにも、早期の実現が望まれます。
2. 4次元の位置情報
第3期地理空間情報活用推進基本計画は、“全国の電子基準点による地殻変動の即時把握の技術開発”が定められています。現在の測量法は、定常的な地殻変動のような時間変化に対応した規定は存在しません。地理空間情報活用推進基本法と同様に、位置情報として4次元対応の法律的根拠が必要になります。技術的には、リアルタイム変動に対応可能な当社が開発した「セミ・ダイナミック リダクション」の活用があります。
3. 2+1次元処理から3次元処理への移行
衛星測位の高度化に伴って既に述べたような測量法の整備が必要になります。更に、現在の測量法は、水平位置と高さは別々な処理となっています。測地学でいう「2+1次元」で3次元処理ではありません。具体的には、日本経緯度原点の測地原子として楕円体高を加えることです。また、トータルステーションにより得られた3次元データは、わざわざ平面と高さに分離し、手間のかかる計算精度の落ちる処理をしています。3次元データは、素直に3次元処理を行うような測量作業規程の改善が求められています。
4. 相対測位から絶対測位への対応
標観測が中心になり、あらゆる位置測量は、座標観測を中心とした細部測量へと移り代わることになります。こうした技術の進歩に見合った測量作業規程の改正が必要になって来るので、測量関係者はその取り組みを行う必要があります。
5. GRS80楕円体の物理定数の規定
以上考察してきましたように、測量法施行令に楕円体高の規定を行うこと及び水準測量と衛星測位から得られる2種類の標高の統一があります。加えて、現在の標高計算にあたって、高さを決めるとき用いる正標高補正及び正規正標高補正の根拠となるGRS80楕円体の物理定数である地心引力定数及び地球の自転角速度の規定が必要になります。