誤差論と最小二乗法
第7回 線形モデル – その1
2020年02月13日
今回から、線形モデルとその解法に入ります。線形モデルは前回も紹介したようにデータ(の期待値)とパラメータの関係が線形であるようなモデルです。例えば、P、Qの座標をそれぞれ![]() とし点PQ間のGNSS基線ベクトルを
とし点PQ間のGNSS基線ベクトルを![]() と表せば、
と表せば、![]() となり観測値との座標の関係は1次(線形)関係で表せます。実は測量では多くの場合(辺長や角観測と座標の関係など)、モデルは線形ではありませんが線形になるように近似して解いています。非線形モデルの線形近似については後の回でお話しします。
となり観測値との座標の関係は1次(線形)関係で表せます。実は測量では多くの場合(辺長や角観測と座標の関係など)、モデルは線形ではありませんが線形になるように近似して解いています。非線形モデルの線形近似については後の回でお話しします。
線形モデルの記述にはベクトルや行列を用いるのが便利ですので、それらを取り扱う線形代数の基礎的な事柄を付録にまとめておきました。必要に応じて参照していただければと思います。
1.線形モデルの表現
![]() 個の測定データのベクトルを、
個の測定データのベクトルを、
![]() 個の未知パラメータからなるベクトルを
個の未知パラメータからなるベクトルを
![]()
ランダム誤差のベクトルを
![]()
としたとき、線形モデルは次のように表されます。
![]()
![]() は
は![]() 行列で計画(モデル)行列と呼ばれ、各成分は既知の定数です。
行列で計画(モデル)行列と呼ばれ、各成分は既知の定数です。
また、
![]()
を仮定しておきます。![]() は
は![]() と同じです。
と同じです。![]() は確率変数で観測値は誤差を含みますが、その期待値がパラメータの線形式で表せるということです。
は確率変数で観測値は誤差を含みますが、その期待値がパラメータの線形式で表せるということです。
上式で![]() は期待値、
は期待値、![]() は共分散をとることを示します。期待値や分散の定義については第2、4回で紹介していますが、複数個の変数がある場合、ベクトル及び行列で表現すると取り扱いが便利です。具体的に書くと、以下のようになります。
は共分散をとることを示します。期待値や分散の定義については第2、4回で紹介していますが、複数個の変数がある場合、ベクトル及び行列で表現すると取り扱いが便利です。具体的に書くと、以下のようになります。
確率変数ベクトル![]() の期待値は
の期待値は

確率変数間の分散を成分に持つ共分散行列(誤差行列)が次のように定義されます。

線型モデルでは、
![]()

です。
また、![]() と
と![]() をそれぞれ定数行列及びベクトルとした時、
をそれぞれ定数行列及びベクトルとした時、![]() の線形変換
の線形変換![]() に関して次の式が成り立ちます。
に関して次の式が成り立ちます。
![]()
![]()
2番目の式は誤差伝播則と呼ばれています。確率変数を変換したとき、その誤差は元の変数の誤差で表せる(誤差が伝わってゆく)という意味です。
誤差伝播の例:
①観測値の和と差
2つの独立な観測値![]() と
と![]() の和(差)
の和(差)
![]()
の分散は![]() との
との![]() の分散をそれぞれ
の分散をそれぞれ![]() と
と![]() とすると、
とすると、![]() なので(6)から
なので(6)から
![]()
標準偏差は、![]() となります。
となります。
②観測値の定数倍
![]() なら
なら
![]()
です。
③平均値の誤差
ある量![]() (例えば基線長)を
(例えば基線長)を![]() 回観測したとします。すると平均値
回観測したとします。すると平均値![]() と(標本)分散
と(標本)分散![]() は、
は、
![]()
です(第1回参照)。平均値の誤差(分散)を求めてみましょう。観測値ベクトルは
です。平均値の式は

と書けますから![]() の線形式です。従って、平均値の分散は(6)より
の線形式です。従って、平均値の分散は(6)より

となり、1観測の分散の![]() になります。また、標準偏差は平方根をとるので
になります。また、標準偏差は平方根をとるので![]() になります(①と②を応用して
になります(①と②を応用して![]() は
は![]() を
を![]() から
から![]() まで足したものと考えれば、分散は
まで足したものと考えれば、分散は![]() =
=![]() と求まります。)。
と求まります。)。
これから線形モデルを用いてパラメータの推定や検定を行うわけですが,今回は(2)の条件の他に計画行列![]() はフルランク
はフルランク![]() と仮定しておきます(2.でわかるように正規方程式が逆行列で解ける場合です)。そうでない場合(ランク落ちという)は、後の回で取り上げます。一つだけ例をあげれば、GNSSによる基線ベクトル観測から位置を求める場合、最低1点の3次元座標を固定することにより、正規方程式の逆行列が存在します。固定点がないとランク落ちとなり逆行列では解けません。
と仮定しておきます(2.でわかるように正規方程式が逆行列で解ける場合です)。そうでない場合(ランク落ちという)は、後の回で取り上げます。一つだけ例をあげれば、GNSSによる基線ベクトル観測から位置を求める場合、最低1点の3次元座標を固定することにより、正規方程式の逆行列が存在します。固定点がないとランク落ちとなり逆行列では解けません。
2. パラメータ推定法とその性質1:最小二乗法
2.1 線形モデルの幾何学
線形モデルを幾何学的に考えてみましょう。観測ベクトル![]() は、
は、![]() 次元空間(データ空間)内のある点を示します。
次元空間(データ空間)内のある点を示します。![]() は計画行列を
は計画行列を
![]()
と列ベクトルに分けると
![]()
と書けます。各列ベクトルは![]() 次元ですからデータ空間内にあり、
次元ですからデータ空間内にあり、![]() の列ベクトルが張る空間(
の列ベクトルが張る空間(![]() :推定空間といいます)はデータ空間の部分空間となっています。そして
:推定空間といいます)はデータ空間の部分空間となっています。そして![]() は
は![]() の値に応じた推定空間内の点を表しています。それと観測値のベクトル
の値に応じた推定空間内の点を表しています。それと観測値のベクトル![]() との差が誤差ベクトル
との差が誤差ベクトル![]() となります。問題は、
となります。問題は、![]() も
も![]() も未知ということです。しかし、
も未知ということです。しかし、![]() はデータですから既知、また、
はデータですから既知、また、![]() は推定空間内にあります。
は推定空間内にあります。
以上のことを3次元(![]() )でイメージできるように図1で示しました。データ
)でイメージできるように図1で示しました。データ![]() は3次元空間内にあり、
は3次元空間内にあり、![]() は
は![]() と
と![]() で張られる3次元空間内の平面でその中に
で張られる3次元空間内の平面でその中に![]() があります。
があります。
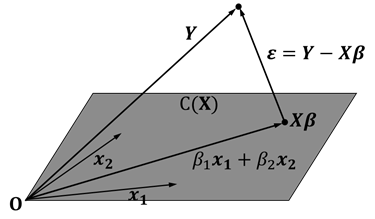
図1.線形モデルの幾何学
最小二乗の条件:推定値![]() が
が
![]()
を満たすとき最小二乗解といいます(![]() は最小値を示します)。
は最小値を示します)。
これは、![]() と
と![]() の距離が最小になるということです。そして、そのようなベクトルは、残差
の距離が最小になるということです。そして、そのようなベクトルは、残差![]() が推定空間と直交するものとして与えられることがわかります(図2)。式で書くと残差のベクトルは計画行列の列ベクトルと直交するので(付録、(4))、
が推定空間と直交するものとして与えられることがわかります(図2)。式で書くと残差のベクトルは計画行列の列ベクトルと直交するので(付録、(4))、
![]()
となります。従って、
![]()
つまり次式が成り立ちます。
![]()
これを正規方程式といいます。
![]() がフルランクとすると
がフルランクとすると![]() のランクは
のランクは![]() となって逆行列が存在します。従って正規方程式を解いて
となって逆行列が存在します。従って正規方程式を解いて
![]()
が、最小二乗解となります。
![]() および誤差
および誤差![]() の推定値は
の推定値は
![]()
![]()
となり、観測値は以下のように分解できます。
![]()
![]() は直交射影と呼ばれるもので、今の場合
は直交射影と呼ばれるもので、今の場合![]() を
を![]() へ垂直に投影したもの(正射影)を与えます。
へ垂直に投影したもの(正射影)を与えます。![]() は、次のような性質を持っています。
は、次のような性質を持っています。
![]()
また、![]() への正射影はただ一つに決まることが証明されます。従って最小二乗解も一意に決定されます。
への正射影はただ一つに決まることが証明されます。従って最小二乗解も一意に決定されます。
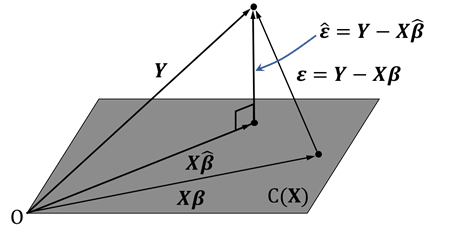
図2.最小二乗法の幾何学
古い最小二乗法の教科書では、正規分布から最小二乗条件を導き出し、観測値Yを正規分布に従うと仮定していました。しかし、図2に示すように、最小二乗解は幾何学的に導かれ、観測値の正規分布の仮定は必要ありません。
簡単な例として、前回紹介した直線回帰の問題を見てみましょう(図3)。
モデルとして、
![]()
![]() 各誤差
各誤差![]() の平均は
の平均は![]() 、分散は
、分散は![]()
を考えます。ベクトルと行列で表現すると、
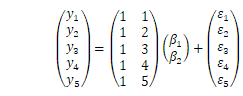
![]()
となります。![]() は正則ですから逆を持ち、
は正則ですから逆を持ち、![]() の最小二乗解が、
の最小二乗解が、

と求まります。
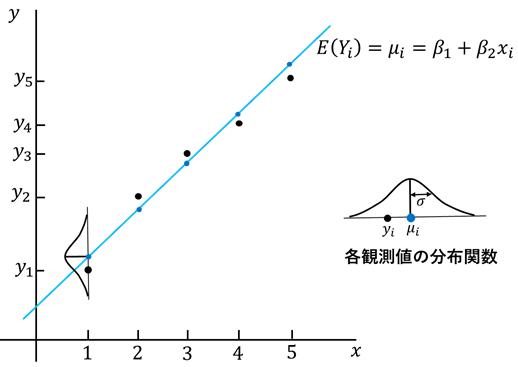
図3.簡単な直線回帰
2.2 最小二乗解の性質
最小二乗解は重要な性質をもっていますので、以下に述べたいと思います。まず、
最小二乗解の不偏性です。
最小二乗解の期待値をとると
![]()
![]()
![]()
となり不偏(期待値が真値に等しい)であることわかります。
最小二乗解の分散
最小二乗解は観測ベクトルの線形関数として与えられますから、誤差伝播により分散を持ちます。分散行列は、
![]()
![]() (6)より
(6)より
![]()
![]()
となります。
ここで、![]() は、未知量
は、未知量![]() の重み係数行列と呼ばれ、未知量の精度に関係しています。正方行列
の重み係数行列と呼ばれ、未知量の精度に関係しています。正方行列![]() のi番目の対角要素
のi番目の対角要素![]() は、i番目の未知数の標準偏差
は、i番目の未知数の標準偏差![]() で表されます。例えば、GNSS測位で観測点の位置をローカル座標系で表した場合、
で表されます。例えば、GNSS測位で観測点の位置をローカル座標系で表した場合、![]() は4行4列で、緯度(n)、経度(e)、高さ(u)及び時間(t)が要素になっています。この要素からHDOP
は4行4列で、緯度(n)、経度(e)、高さ(u)及び時間(t)が要素になっています。この要素からHDOP![]() (水平DOP)が導かれます。
(水平DOP)が導かれます。
最良不偏推定値BLUE
推定値を求める時の基準としてBLUEというものがあります。BLUEとは(Best Linear Unbiased Estimator)の頭文字で最小の分散を持つ不偏な線形の推定値という意味です。これに関しては有名な次の定理があります。
ガウス‐マルコフの定理
線形モデル
![]()
において,![]() が推定可能ならばそのBLUEは
が推定可能ならばそのBLUEは![]() である。ここで、
である。ここで、![]() は、正規方程式
は、正規方程式![]() を満たす最小二乗解である。
を満たす最小二乗解である。
推定可能とは、![]() の線形式からなる
の線形式からなる![]() の不偏推定量が存在するということです。今回の仮定では
の不偏推定量が存在するということです。今回の仮定では![]() 自体が最小二乗解として不偏ですから
自体が最小二乗解として不偏ですから![]() は推定可能です。
は推定可能です。![]() がフルランクでない場合は
がフルランクでない場合は![]() の適当な一次式が推定可能となります。証明はここでは省略しますが、一般の教科書に載っていますので(例えば、参考文献2)興味ある方は参照してください。
の適当な一次式が推定可能となります。証明はここでは省略しますが、一般の教科書に載っていますので(例えば、参考文献2)興味ある方は参照してください。
2.3 誤差分散 の推定
の推定
残差の二乗和を考えましょう。モデルに最小二乗解を代入すると残差は、
![]()
となります。ここで、![]()
ですから、残差![]() は誤差ベクトルのみに依存することがわかります。そこで残差二乗和の期待値をとると、
は誤差ベクトルのみに依存することがわかります。そこで残差二乗和の期待値をとると、
![]()
となることがわかっています(参考文献2等参照)。従って、![]() は残差二乗和から
は残差二乗和から
![]()
と推定できることになります。![]() を自由度といいます。
を自由度といいます。![]() は
は![]() がフルランクなら未知パラメータの数
がフルランクなら未知パラメータの数![]() と同じです。
と同じです。
次回は、一般の最小二乗法について紹介し、測量における線形モデルの簡単な例とその解についてお話ししたいと思います。
『第7回付録 線形(線型)代数の基礎』へ
『第8回 線形モデル – その2』へ
参考文献
1.Christensen, R.: Plane Answers to Complex Questions: The Theory of Linear Models (2011), Springer Texts in Statistics, New York.
2.東京大学教養学部統計学教室編: 自然科学の統計学(2016), 東京大学出版会.